|
つくば生物ジャーナル Tsukuba Journal of Biology (2007) 6: TJB200701200310801
昆虫の行動を指令する脳情報を用いた生体機械融合システムの構築
峯岸 諒(筑波大学 生物学類 4年) 指導教員:山岸 宏(筑波大学 生命環境科学研究科)、神崎 亮平(東京大学 先端科学技術研究センター)
1. 背景
動物は、時々刻々と変化する環境に応じて適切な行動を発現する。なかでも本能行動は、生存する上で必須な行動であり、進化の過程で洗練された生得的な行動である。雄カイコガ (Bombyx mori) のフェロモン源探索行動は、シンプルな行動パターンからなることから、本能行動のモデルとして、その発現機構について神経行動学的な解析が進められている。雄カイコガは、雌の性フェロモンを触角で受容すると、直進歩行、ジグザグターン、回転からなるプログラム行動を発現し、雌へ定位する。この行動発現の過程において、脳と運動中枢である胸部神経節をつなぐ下降性神経の応答は、脳からの行動指令情報として重要であり、詳細な解析が行われてきた。これまでに、フェロモン刺激に対して、スパイク頻度の高い状態と低い状態が切り替わる「フリップフロップ応答」を示す神経群が同定されており、この応答が直進やターンを指令する行動の指標であると考えられている。しかし、これらの下降性神経群の活動と、実際の定位行動を結びつける直接的な知見は得られていない。
そこで本研究では、下降性神経の定位行動に対する役割を解明するために、下降性神経と接続を持つ頚運動神経の活動計測と、得られた神経活動に基づく行動のシミュレーションを、閉ループで結びつけた実験系を構築し、評価を行った。
2. 方法
構築した実験系は、神経情報の計測系と、行動シミュレーションから構成される。コンピュータ上に設定された仮想カイコガは、フェロモンの存在する仮想環境を、得られた神経情報に基づいて移動する。仮想カイコガとフェロモンとの接触は、計測系へのフェロモン刺激としてフィードバックされる(図1)。
2.1 細胞外計測による神経情報の計測
実験には、羽化2〜5日後の成虫の雄カイコガ (Bombyx mori) を用い、左右の頚振りを制御する頚運動神経束 (2ndCNa) から神経活動の計測を行った。これは、歩行中の左右の頚振りの角度が,回転歩行角度と対応すること、そして頚運動神経が、フリップフロップ応答を示す下降性神経と接続することが報告されており、行動の指標となると考えたためである。
実験用チェンバーに固定したカイコガの頚部を切開し、頚運動神経の末端を切断した。先端径を神経束断端の直径に合わせたガラス微小電極内に、シリンジを用いて2ndCNaを吸引し、増幅器に接続して神経活動を誘導した。フェロモン刺激は、濾片に浸み込ませたカイコガ性フェロモンの主成分Bombykol (10 - 100 ng) をパスツールピペットに入れ、圧縮空気を電磁弁で制御して左右の触角にそれぞれ与えた。
2.2 仮想環境における行動シミュレーション実験
ソフトウェアLabVIEWを用いて、フェロモン源の存在する仮想環境を設定し、得られる神経情報に対応した仮想的なカイコガの運動を再現した。仮想カイコガは独立二輪駆動のロボットとし、進行速度は、(0.1秒あたりに得られた左右2ndCNaのスパイク数) x (定数r) = (仮想カイコガの右左車輪の進行速度)から計算した。仮想カイコガの触角が、仮想環境を流れるフェロモン内の座標に入ると、計測系の電磁弁が駆動され、実際のカイコガの触角にフェロモン刺激が与えられるようにプログラムした。
構築した実験系を評価するために、定数rを変化させ、仮想カイコガがフェロモン源へ到達できるか調べた。
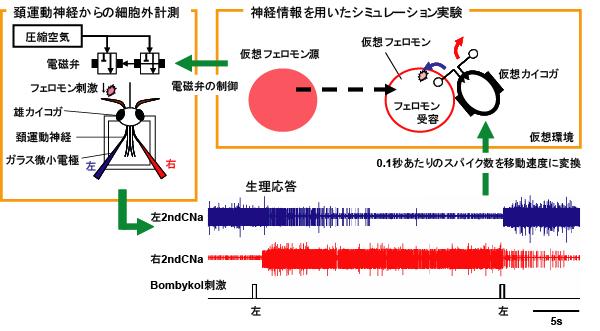
図1 神経情報計測と行動シミュレーションの閉ループ実験系
3. 結果と考察
フェロモン刺激に対する2ndCNaの応答は、報告されている下降性神経と同様にフリップフロップ応答を示した。このことから、2ndCNaの神経情報を用いて行動の指標とすることの妥当性が確かめられた。
スパイク頻度を進行速度へ変換する定数rの値を0.1から0.5まで変えていった結果、r = 0.3で5個体13例中2例がフェロモン源へ定位した。フェロモン源に定位した2例では、仮想カイコガはフェロモンの流れ(プルーム)の中を移動し、プルームから外れても回転して再び戻るなど、実際のカイコガと同様の行動を示した。一方、r = 0.1, 0.2, 0.4, 0.5では、いずれもプルームから外れても戻ることができず、フェロモン源へ定位できなかった。例数は少ないものの、r = 0.3で定位成功例が得られたことから、フェロモン源への定位成功率を指標として、これを向上させるための神経情報−移動速度変換アルゴリズムを開発することで、下降性神経の定位行動に果たす役割を理解できると考えられる。
以上の結果から、神経活動計測と、シミュレーション環境とを閉ループで接続するための基礎的な手法とその意義を提示することができた。今後は、過去に行われた行動実験を参考に、仮想カイコガの標準移動速度や、実環境に近いフェロモン分布パターンを設定することで、安定した定位成功率を目指す。また、今回のシミュレーション実験の部分を、実環境中を移動するロボットに置き換えてフェロモン源への定位能を調べる実験系の構築についても計画している。
©2007 筑波大学生物学類
|